

End User License & Prohibited End-Use Terms
The available downloads are intended solely for customers of Inlux Robotics and may not be shared with third parties. By gaining access, you agree to the applicable terms and conditions.
Enter Password
Please accept the terms of service.
Incorrect password
C | Sicherheit
D | Bewegungen
▶️ D1 - Punkt-zu-Punkt-Bewegung (PTP)
▶️ D2 - Lineare Bewegung (LIN)
▶️ D3 - Bogenbewegung (ARC)
▶️ D4 - Kreisbewegung
▶️ D5 - Versetzte Bewegungen
▶️ D6 - Bewegungs-Glättung
▶️ D7 - Bewegungsaufzeichnung (TPD)
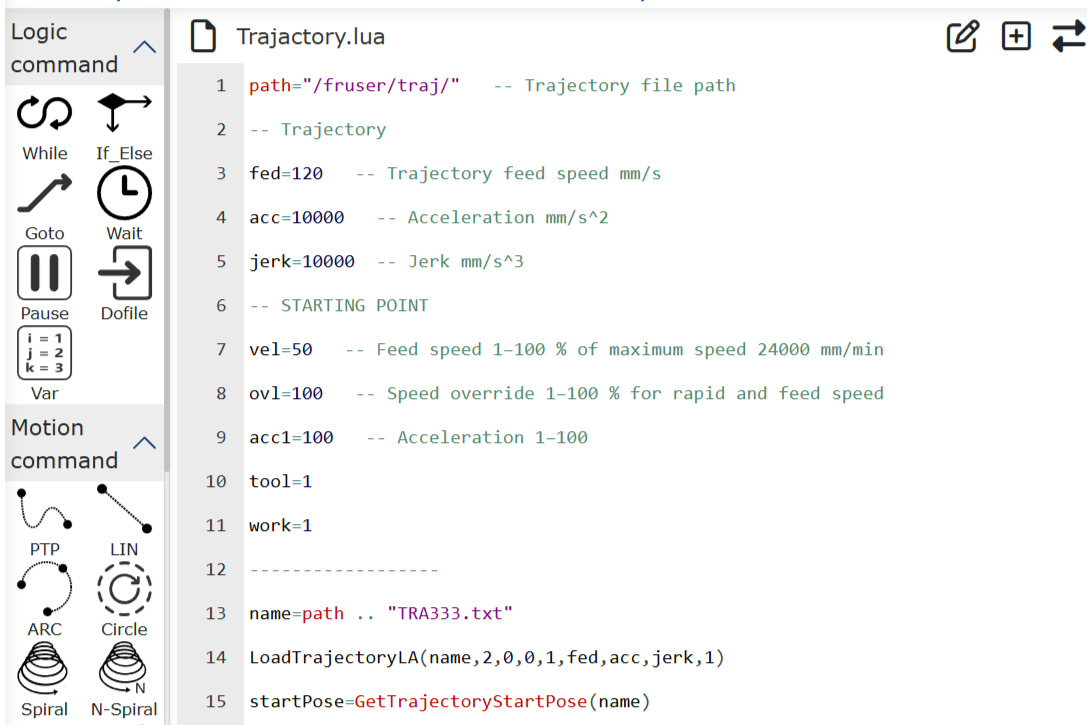
▶️ D8 - Trajektorienbewegung
▶️ D9 - Servobewegung
▶️ D10 - Webbewegung
▶️ D11 - Bewegen bis (FT-Sensor)
▶️ D12 - Bewegung von aktueller Position
F | Steuerung & Kommunikation
▶️ F1 - Digitale & Analoge Ein-/Ausgänge
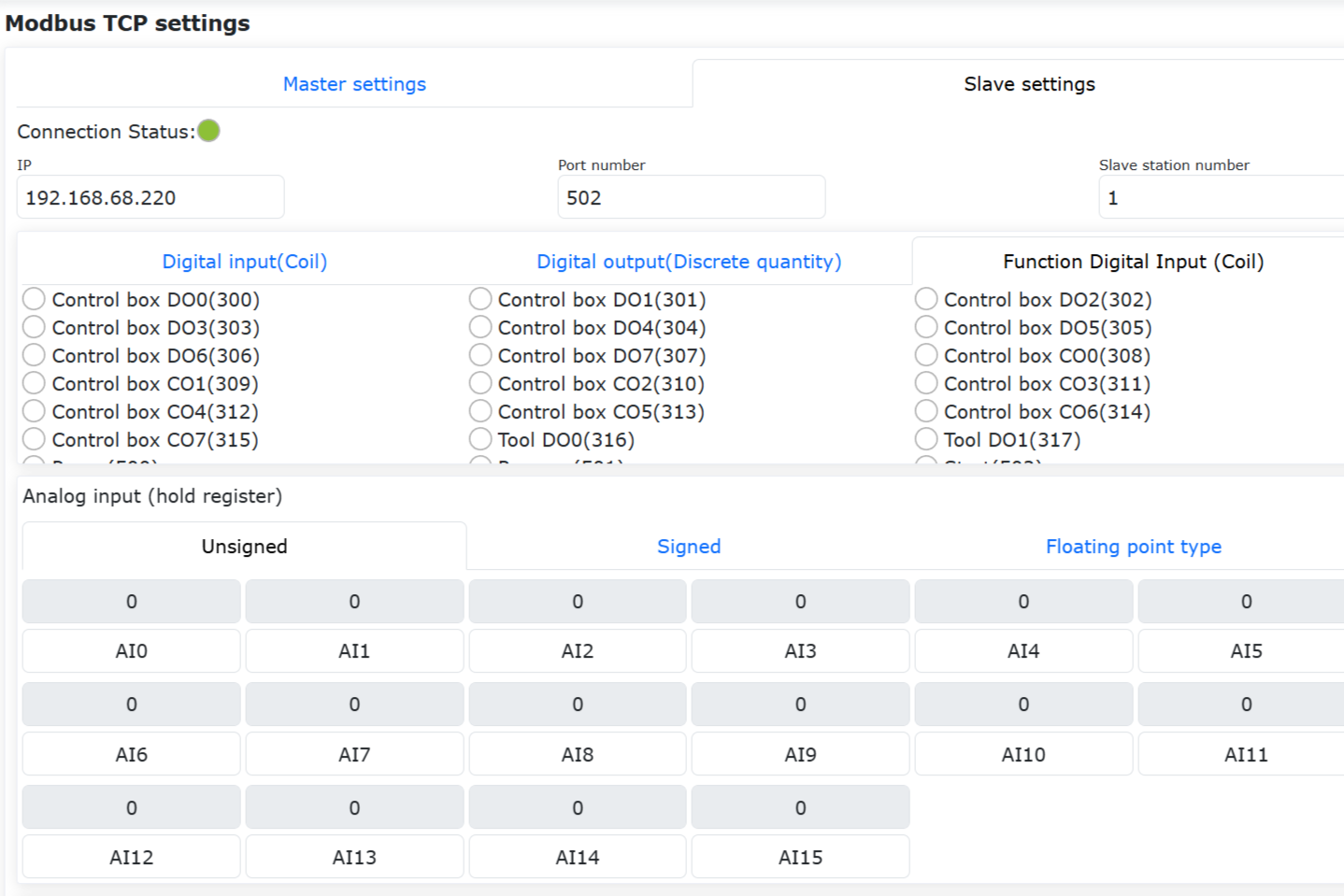
⏳ F2 - Modbus-Kommunikation
⏳ F3 - Socket-Kommunikation
▶️ F4 - Profinet-Kommunikation
🔗 F4 - Profinet-Dateien
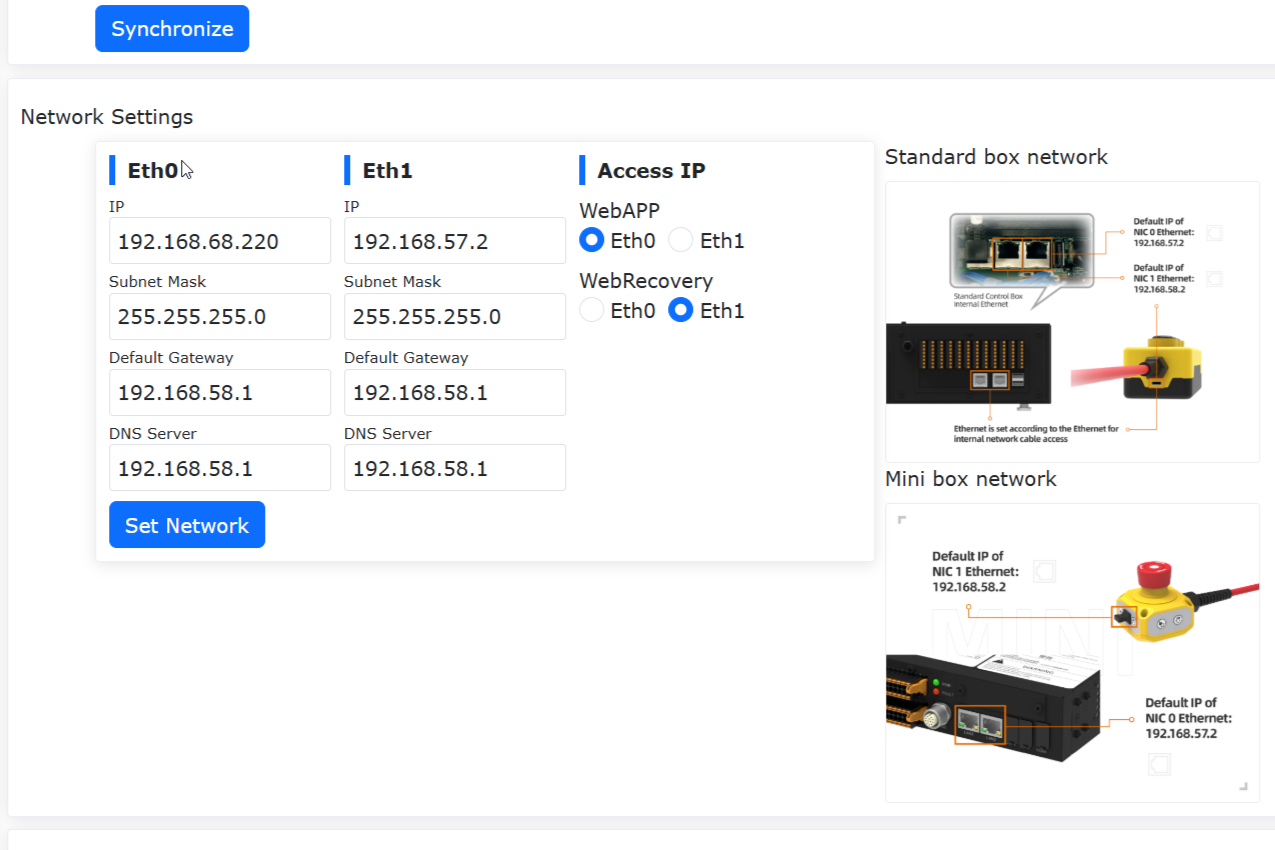
⏳ F5 - Ethernet/IP-Kommunikation
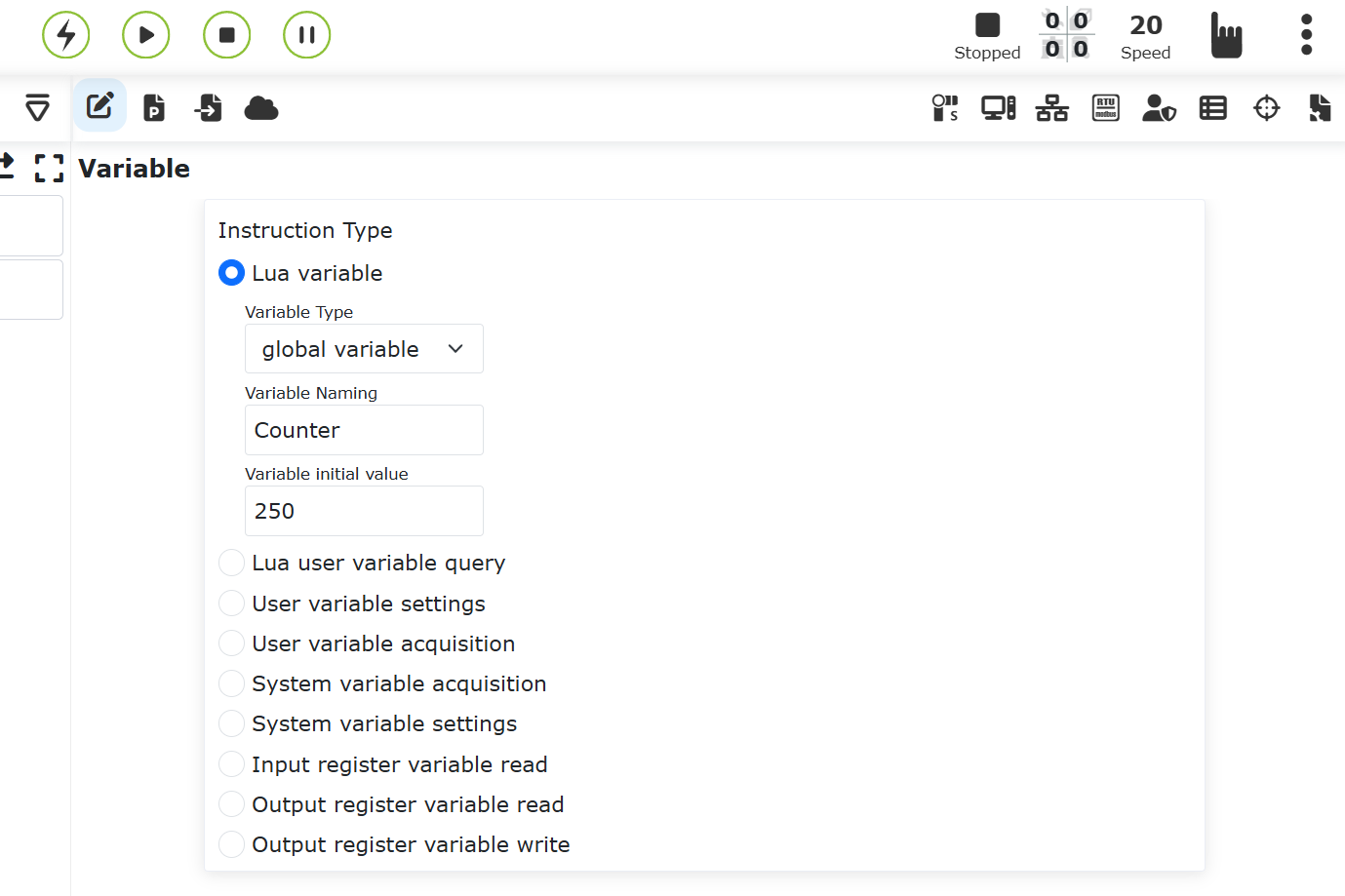
H | LUA Advanced
Ich | SDK & Mehr
⏳ I1 - Python SDK
⏳ I2 - C++ SDK
⏳ I3 - C# SDK
⏳ I4 - Java SDK
⏳ I5 - ROS
⏳ I6 - ROS2
⏳ I7 - MoveIt2
⏳ I8 - TCP/IP-Kommunikationsprotokoll